
ພາບລວມ
ເຄື່ອງມືເຄື່ອງຈັກ CNC ແມ່ນການນໍາໃຊ້ປະສົມປະສານຂອງກົນຈັກ, ໄຟຟ້າ, ໄຮໂດຼລິກ, ນິວເຄຼຍ, ໄມໂຄອີເລັກໂທຣນິກແລະຂໍ້ມູນແລະເຕັກໂນໂລຢີອື່ນໆເຊິ່ງເປັນຫນຶ່ງໃນຜະລິດຕະພັນປະສົມປະສານກັບລະບົບໄຟຟ້າ, ໃນອຸປະກອນການຜະລິດກົນຈັກທີ່ມີຄວາມຍືດຫຍຸ່ນ, ສາກົນ, ຄວາມແມ່ນຍໍາສູງ, ສູງ. ປະສິດທິພາບ "ຄວາມຍືດຫຍຸ່ນ" ອຸປະກອນການຜະລິດອັດຕະໂນມັດ, ມັນຈະປະມວນຜົນການດໍາເນີນງານຕ່າງໆແລະຂັ້ນຕອນທີ່ຕ້ອງການແລະຮູບຮ່າງແລະຂະຫນາດຂອງ workpi-ece, ດ້ວຍລະຫັດດິຈິຕອນ, ໂດຍຜ່ານຂະຫນາດກາງຄວບຄຸມເຂົ້າໄປໃນອຸປະກອນຄວບຄຸມຕົວເລກ, ອຸປະກອນຄວບຄຸມຕົວເລກໄປຫາຂໍ້ມູນປ້ອນຂໍ້ມູນ. ການປຸງແຕ່ງແລະການຄິດໄລ່, ຄໍາສັ່ງຄວບຄຸມລະບົບເຄື່ອງມືເຄື່ອງຈັກແລະອົງປະກອບຂັບ, ການປະມວນຜົນອັດຕະໂນມັດຂອງ workpiece ທີ່ກໍານົດໄວ້. ລະດັບເຕັກນິກຂອງເຄື່ອງມືເຄື່ອງ CNC ແລະອັດຕາສ່ວນຂອງຜົນຜະລິດແລະຄວາມເປັນເຈົ້າຂອງທັງຫມົດຂອງເຄື່ອງມືເຄື່ອງຕັດໂລຫະແມ່ນຕົວຊີ້ວັດທີ່ສໍາຄັນເພື່ອໃຫ້ແນ່ໃຈວ່າລະດັບການພັດທະນາເສດຖະກິດແຫ່ງຊາດແລະການຜະລິດອຸດສາຫະກໍາຂອງປະເທດ. ໃນຊຸມປີມໍ່ໆມານີ້, ສ່ວນແບ່ງຂອງເຄື່ອງຈັກ CNC ໃນວິສາຫະກິດຈີນໄດ້ເພີ່ມຂຶ້ນໃນແຕ່ລະປີ, ແລະມັນໄດ້ຖືກນໍາໃຊ້ຫຼາຍຂຶ້ນໃນວິສາຫະກິດຂະຫນາດໃຫຍ່ແລະຂະຫນາດກາງ, ແລະໂດຍທົ່ວໄປແລ້ວມັນຍັງຖືກນໍາໃຊ້ໃນວິສາຫະກິດຂະຫນາດນ້ອຍແລະຂະຫນາດກາງແລະແມ້ກະທັ້ງ. ວິສາຫະກິດສ່ວນບຸກຄົນ.
ຄວາມຕ້ອງການຂະບວນການ CNClathe
- ໃນເວລາທີ່ workpiece ໄດ້ຖືກປຸງແຕ່ງໂດຍ CNC lathe, ປະລິມານອາຫານແມ່ນຂະຫນາດໃຫຍ່, ຄວາມໄວ proce-ssing ຕ່ໍາ, ແລະຂະບວນການ machining ມີຜົນກະທົບການໂຫຼດເນື່ອງຈາກພື້ນຜິວທີ່ບໍ່ສະເຫມີພາບຂອງ workpiece ໄດ້.
- Lathefinishing, ຈໍານວນອາຫານແມ່ນຫນ້ອຍ, ເພື່ອຮັບປະກັນປະສິດທິພາບການປຸງແຕ່ງ, ຄວາມໄວໃນການປຸງແຕ່ງແມ່ນສູງ.
- ມໍເຕີ spindle ຈໍາເປັນຕ້ອງມີຄວາມໄວຕ່ໍາແລະແຮງບິດສູງ, ແລະເປັນ stab-le, ແລະສາມາດແລ່ນດ້ວຍຄວາມໄວສູງ.
- ການຮັບສັນຍານອະນາລັອກຮຽກຮ້ອງໃຫ້ມີ linearity ສູງແລະການຂັດຂວາງການໂຫຼດຕ່ໍາ.
- ສິ່ງລົບກວນຂອງ Themotor ມີຂະຫນາດນ້ອຍ, ແລະການແຊກແຊງກັບອຸປະກອນອັດຕະໂນມັດຂອງລະບົບແມ່ນຂະຫນາດນ້ອຍ. ເລັ່ງຄວາມໄວແລະຄວາມໄວລົງຫນ້ອຍທີ່ສຸດເທົ່າທີ່ເປັນໄປໄດ້.
ຂໍ້ໄດ້ປຽບຂອງ CNClathe KD600 ຜະລິດຕະພັນຊຸດ
Kd600 series inverter vector ປະສິດທິພາບສູງຮັບຮອງເອົາເຕັກໂນໂລຊີການຄວບຄຸມ flux ກ້າວຫນ້າທາງດ້ານ, ແຮງບິດມໍເຕີຢູ່ທີ່ຄວາມໄວຕ່ໍາມີຂະຫນາດໃຫຍ່, ຄວາມຖືກຕ້ອງຂອງຄວາມໄວແມ່ນສູງ, ລາຄາແມ່ນສົມເຫດສົມຜົນ, ຫນ້າທີ່ສໍາເລັດ, ມີການປະມວນຜົນຄວາມລົ້ມເຫຼວຂອງພະລັງງານທັນທີທັນໃດແລະການຕິດຕາມຄວາມໄວແລະເລີ່ມຕົ້ນອີກເທື່ອຫນຶ່ງເຮັດວຽກ , ເພື່ອຮັບປະກັນວ່າລະບົບບັນລຸກົນໄກການດໍາເນີນງານຢ່າງຕໍ່ເນື່ອງ, ເພື່ອຮັບປະກັນວ່າມໍເຕີກໍາລັງເຮັດວຽກຢູ່ໃນສະພາບປະສິດທິພາບສູງສຸດ, ດັ່ງນັ້ນ, ການນໍາໃຊ້ inverter vector ປະສິດທິພາບສູງຊຸດ KD600 ແທນທີ່ຈະເປັນ spindle AC servo ລະບົບເປັນທາງເລືອກທີ່ດີທີ່ສຸດສໍາລັບອຸດສາຫະກໍາເຄື່ອງມືເຄື່ອງຈັກ. inverter ຊຸດ KD600 ມີຄຸນສົມບັດດັ່ງຕໍ່ໄປນີ້:
- ເຕັກໂນໂລຊີການຄວບຄຸມແມ່ເຫຼັກອ່ອນແອເປັນເອກະລັກ: ສາມາດເປັນການຄວບຄຸມທີ່ດີຂອງຄວາມຖີ່ຕ່ໍາ motor torque ຂະຫນາດໃຫຍ່, ສາມາດດໍາເນີນການໃນ 0 ~ 600Hz.
- ຄວາມໄວຢຸດທີ່ໄວໄດ້: ເຕັກໂນໂລຊີການຢຸດ flux deceleration ສະນະແມ່ເຫຼັກສາມາດເຮັດໃຫ້ motor ຊ້າລົງແລະຢຸດໃນເວລາສັ້ນ.
- ຄວາມຖືກຕ້ອງຂອງຄວາມໄວແລະຄວາມຫມັ້ນຄົງ: linearity ຂອງການຕັ້ງຄ່າຄວາມໄວແມ່ນດີ, ຄວາມຖືກຕ້ອງຂອງຄວາມຫມັ້ນຄົງຂອງຄວາມໄວແມ່ນສູງ, ແລະການເຫນັງຕີງຂອງຄວາມໄວແມ່ນພາຍໃນ 5/1000 ເມື່ອການໂຫຼດປ່ຽນແປງ.
- ປະສິດທິພາບຄວາມຖີ່ຕ່ໍາທີ່ດີເລີດ: ເພີ່ມປະສິດທິພາບ PG-free vector algorithm ການຄວບຄຸມ, ຄວາມຖີ່ຕ່ໍາ 1Hz ເຖິງ 150% rating torque output, ເພື່ອຮັບປະກັນແຮງຕັດທີ່ເຂັ້ມແຂງໃນລະຫວ່າງການປະມວນຜົນເປົ່າ.
- ໂຫມດການປ້ອນຂໍ້ມູນຄວາມຖີ່ໃຫ້ຫຼາຍ: 2 ແຫຼ່ງແຮງດັນ 0 ~ 10V ຫຼື -10V ຫາ +10V input, 1 ແຫຼ່ງປະຈຸບັນ 4~20mA ຫຼື 0~20mA input.
- ລະດັບຄວາມກ້ວາງຂອງການນໍາໃຊ້ແຮງດັນຕາຂ່າຍໄຟຟ້າ: ການອອກແບບການສະຫນອງພະລັງງານສະຫຼັບແບບພິເສດສາມາດນໍາໃຊ້ກັບສະພາບແວດລ້ອມຕາຂ່າຍໄຟຟ້າທີ່ຫລາກຫລາຍ.
- ຂະບວນການຜະລິດທີ່ສວຍງາມ: ຮັບຮອງເອົາຂະບວນການເຄືອບຫນາທີ່ເປັນເອກະລັກ, ທໍ່ອາກາດຖືກແຍກອອກຈາກ PCB ພາຍໃນ, ແລະມີຄວາມສາມາດປັບຕົວໄດ້ຢ່າງແຂງແຮງກັບສະພາບແວດລ້ອມທາງດ້ານຮ່າງກາຍທີ່ຮຸນແຮງເຊັ່ນ: ຂີ້ຝຸ່ນໂລຫະ, ອາຍແກັສ corrosive, ແລະຄວາມຊຸ່ມຊື່ນ.
- ວົງຈອນການດູດຊຶມການຮົ່ວໄຫຼໃນຕົວຊ່ວຍຫຼຸດຜ່ອນການຊ໊ອກໄຟຟ້າໃຫ້ກັບຮ່າງກາຍຂອງມະນຸດໄດ້ຢ່າງຫຼວງຫຼາຍເມື່ອອຸປະກອນທີ່ພັກອາໄສຖືກສາກໄຟ.
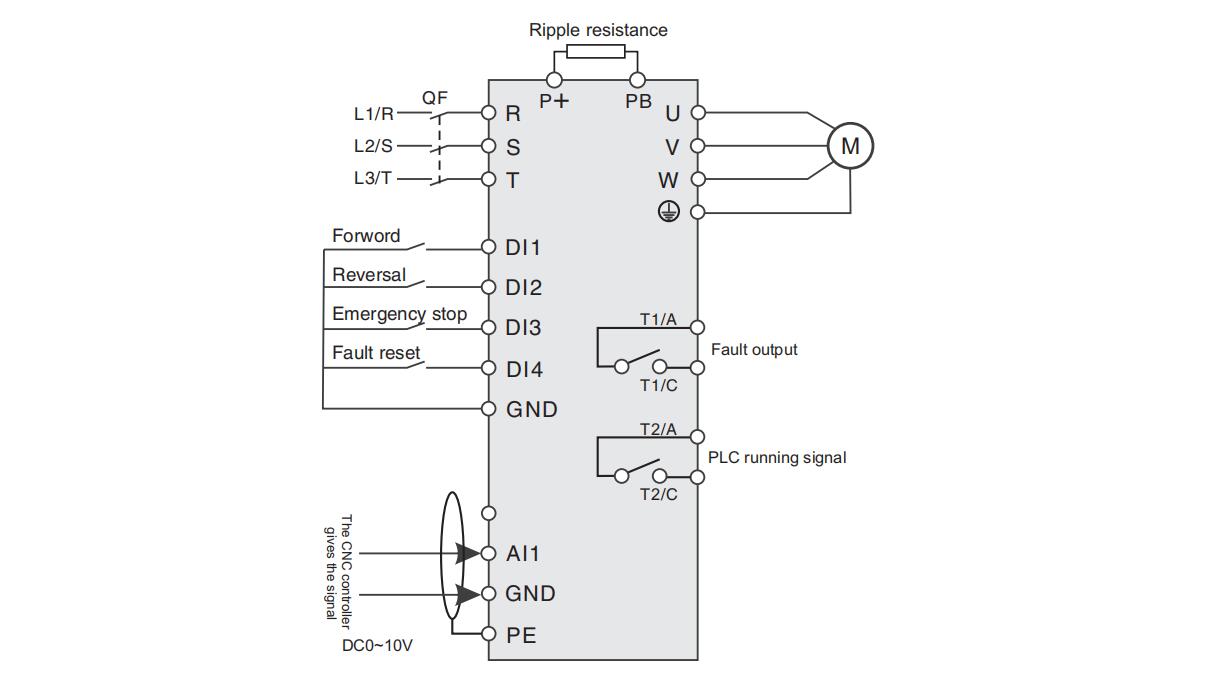
ແຜນວາດສາຍໄຟພື້ນຖານ
ການຕັ້ງຄ່າພາລາມິເຕີແລະຄໍາອະທິບາຍ
| ການຕັ້ງຄ່າພາລາມິເຕີ | ຄໍາແນະນໍາ | ການຕັ້ງຄ່າພາລາມິເຕີ | ຄໍາແນະນໍາ |
| P0-03=1 | ບໍ່ມີໂຫມດ vector PG | P4-01=11KW | ການປະເມີນພະລັງງານຂອງມໍເຕີ |
| P0-04=1 | ສະຖານີພາຍນອກເລີ່ມຕົ້ນຫຼືຢຸດ | P4-02=380V | ແຮງດັນທີ່ຈັດອັນດັບຂອງມໍເຕີ |
| P0-06=2 | ປະລິມານອະນາລັອກ AI1 ແມ່ນໃຫ້ | P4-04=22.6A | ການປະເມີນປັດຈຸບັນຂອງມໍເຕີ |
| P0-14=150 | ຄວາມຖີ່ຜົນຜະລິດສູງສຸດ | P4-05=50Hz | ປະເມີນຄວາມຖີ່ຂອງມໍເຕີ |
| P0-16=150 | ຂີດຈຳກັດຄວາມຖີ່ຂອງການໃຊ້ງານເທິງ | P1-06=1435RPM | ຄວາມໄວຂອງມໍເຕີຈັດອັນດັບ |
| P0-23=1.0 | ເວລາເລັ່ງ | P6-00=2 | ຜົນຜະລິດຜິດ |
| P0-24=0.8 | ເວລາຊ້າ | P6-02=1 | ຕົວປ່ຽນຄວາມຖີ່ໃນການດໍາເນີນງານ |
| P5-00=1 | ແລ່ນໄປໜ້າ | P5-01=2 | ແລ່ນປີ້ນ |
| ຕົວກໍານົດການມໍເຕີ P4-01~P4-06 ກະລຸນາໃສ່ຢ່າງຖືກຕ້ອງ | |||
ຜົນການດີບັກ
ມັນໄດ້ຖືກພິສູດແລ້ວວ່າຊຸດ KD600 ເຄື່ອງແປງຄວາມຖີ່ vector ທີ່ມີປະສິດທິພາບສູງສາມາດຕອບສະຫນອງຄວາມຕ້ອງການຂອງການຄວບຄຸມ spindle ເຄື່ອງມືເຄື່ອງຈັກໄດ້ຢ່າງເຕັມສ່ວນ. KD600 ຮັບຮອງເອົາຮູບແບບການຄວບຄຸມ vector ທີ່ບໍ່ມີ PG ຊັ້ນນໍາ, ເຊິ່ງສາມາດສົ່ງແຮງບິດ 150% ໄດ້ຢ່າງລຽບງ່າຍເຖິງແມ່ນວ່າພາຍໃຕ້ການດໍາເນີນງານທີ່ມີຄວາມໄວຕ່ໍາ (ຄວາມຖີ່ຕ່ໍາ) ເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂອງການປຸງແຕ່ງຂອງພາກສ່ວນຕ່າງໆ, ແລະສາມາດທົດແທນໂຄງສ້າງ spindle bearing ມ້ວນແບບດັ້ງເດີມຢ່າງສົມບູນ, ແລະ spindle ນີ້. ໂຄງປະກອບການແມ່ນງ່າຍດາຍ, ຫນາແຫນ້ນ, ແລະສາມາດບັນລຸລະບຽບການຄວາມໄວ stepless ທີ່ແທ້ຈິງ. ຄວາມໄວຂອງ spindle ນີ້ຖືກຄວບຄຸມໂດຍສັນຍານການປຽບທຽບພາຍນອກເພື່ອຄວບຄຸມຄວາມຖີ່ຂອງຜົນຜະລິດໃນຂະບວນການປະມວນຜົນທີ່ແຕກຕ່າງກັນ (ເຊັ່ນ: Roughing, ສໍາເລັດຮູບ, ແລະອື່ນໆ) ຕ້ອງການຄວາມໄວທີ່ແຕກຕ່າງກັນ, ໃນເວລານີ້, ລະບົບຄວບຄຸມຕົວເລກສາມາດສົ່ງສັນຍານແຮງດັນ analog ທີ່ແຕກຕ່າງກັນໄປ. inverter ເພື່ອບັນລຸຄວາມໄວທີ່ແຕກຕ່າງກັນ, ແລະສັນຍານເລີ່ມຕົ້ນແລະຢຸດຍັງຖືກຄວບຄຸມໂດຍລະບົບການຄວບຄຸມຕົວເລກ, ເຊິ່ງປັບປຸງລະດັບຂອງອັດຕະໂນມັດແລະຍືດອາຍຸການບໍລິການຂອງເຄື່ອງມື.

ເວລາປະກາດ: 17-11-2023