
ພາບລວມ
ເຄນຂົວ, ເປັນທີ່ຮູ້ຈັກທົ່ວໄປເປັນ "ຂັບລົດ", ແມ່ນປະເພດຂອງເຄື່ອງຈັກຍົກທີ່ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນວິສາຫະກິດອຸດສາຫະກໍາແລະການຂຸດຄົ້ນບໍ່ແຮ່, ກົນໄກການເຮັດວຽກຂອງມັນແມ່ນປະກອບດ້ວຍສາມລະບົບການຂັບລົດເອກະລາດພື້ນຖານ, ລະບົບຂັບລົດລົດ, ລະບົບການຂັບລົດ hook, inverter K-DRIVE ກັບ. ຂ້າງເທິງສາມລະບົບການຂັບລົດການປະຕິຮູບສົບຜົນສໍາເລັດ, ຕໍ່ໄປນີ້ສ່ວນໃຫຍ່ແມ່ນອະທິບາຍຂະບວນການຫັນປ່ຽນຂອງການຂັບລົດກ່ອນແລະຫຼັງຈາກລະບົບການຍ່າງ.

ໂຄງການ ຂໍ້ດີ
- Field oriented ປະຈຸບັນການຄວບຄຸມ vector open-loop, decoupled ຢ່າງເຕັມສ່ວນຕົວແປ motor, ຂະຫນາດໃຫຍ່ torqu-e ຄວາມຖີ່ຕ່ໍາ, ການຕອບສະຫນອງໄວ, ແລະອື່ນໆ;
- KD600adopts PG ຮູບແບບການຄວບຄຸມ vector ເປີດ loop ຟຣີແລະຮູບແບບ vectorized V / F, ແລະຂະຫຍາຍການປັບຄ່າພະລັງງານ le-vel ຂອງເກຍທໍາອິດ;
- ຊ່ວງຄວາມຖີ່: 0.5-600Hz segment setting, stepl-ess ປັບຢ່າງຕໍ່ເນື່ອງ;
- ລະດັບແຮງດັນທີ່ເຮັດວຽກ: 380V ± 20%, ແລະລົດເມ vol-tage ຫຼຸດລົງເຖິງ 360VDC ທັນທີສໍາລັບບັນຫາການເປີດການຟຣີ;
- Overloadcapacity: 150% ຂອງປະຈຸບັນຈັດອັນດັບ, 1 ນາທີອະນຸຍາດ; 200% rating ໃນປັດຈຸບັນ, 1s ອະນຸຍາດ;
- ຄຸນລັກສະນະຂອງແຮງບິດ: ແຮງບິດເລີ່ມຕົ້ນ, ຫຼາຍກ່ວາ 2 ເທົ່າຂອງແຮງບິດທີ່ຖືກຈັດອັນດັບ; ແຮງບິດຄວາມຖີ່ຕ່ໍາ, ຫຼາຍກ່ວາ 1.6 ເທົ່າຂອງ torque ຈັດອັນດັບຢູ່ທີ່ 1Hz; ແຮງບິດເບຣກແມ່ນສູງກວ່າແຮງບິດທີ່ຈັດອັນດັບ.
ລັກສະນະການດໍາເນີນງານ
- ກົນໄກການຍົກເຄນມີແຮງບິດເລີ່ມຕົ້ນຂະຫນາດໃຫຍ່, ເຊິ່ງປົກກະຕິແລ້ວເກີນ 150% ຂອງແຮງບິດທີ່ຖືກຈັດອັນດັບ. ຖ້າ overload ແລະປັດໃຈອື່ນໆຖືກພິຈາລະນາ, ຢ່າງຫນ້ອຍ 200% ຂອງແຮງບິດທີ່ຖືກຈັດອັນດັບຈະຖືກສະຫນອງໃຫ້ໃນລະຫວ່າງການເລີ່ມຕົ້ນແລະເລັ່ງ;
- ໃນເວລາທີ່ກົນໄກການຍົກແລ່ນລົງລຸ່ມ, ມໍເຕີຈະຢູ່ໃນສະພາບການຜະລິດພະລັງງານ regenerative ແລະຈະຕ້ອງເປັນ braking ການບໍລິໂພກພະລັງງານຫຼື regenerative ຄວາມຄິດເຫັນກັບຕາຂ່າຍໄຟຟ້າ;
- ການໂຫຼດຂອງກົນໄກການຍົກມີການປ່ຽນແປງ dram-atically ເມື່ອວັດຖຸທີ່ຍົກອອກໄປຫຼືແຕະພື້ນດິນ, ແລະຕົວແປງຄວາມຖີ່ຈະສາມາດຄວບຄຸມການໂຫຼດ impa-ct ໄດ້ກ້ຽງ;
- ຄວາມໄວໃນການເດີນທາງຂອງກົນໄກການເດີນທາງດ້ານຫນ້າແລະດ້ານຫລັງຂອງເຄນບໍ່ສູງໃນລະຫວ່າງການອອກແບບກົນຈັກ, ຕົວແປງສາມາດນໍາໃຊ້ສໍາລັບຄວາມໄວເກີນທີ່ເຫມາະສົມເພື່ອປັບປຸງປະສິດທິພາບການເຮັດວຽກ.
ແຜນວາດສາຍໄຟງ່າຍດາຍ
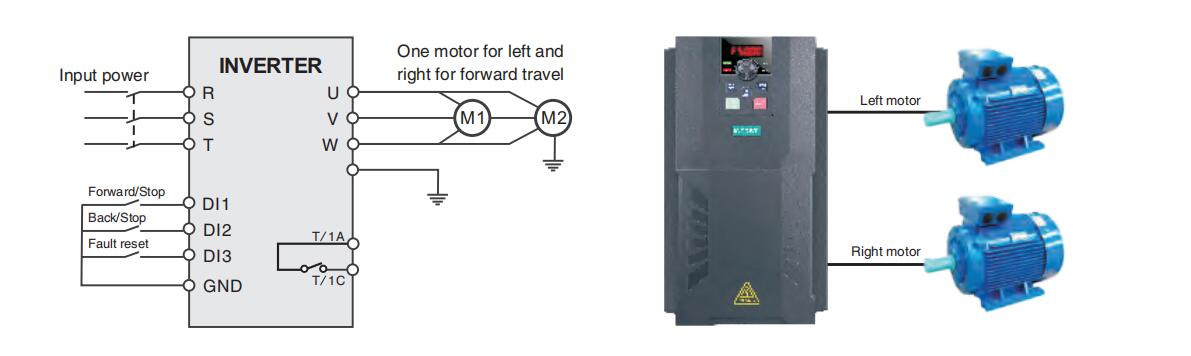
ພາຣາມິເຕີ setting ແລະຄໍາອະທິບາຍ(ຕົວກໍານົດການເດີນທາງມໍເຕີຊ້າຍແລະຂວາ)
| ພາລາມິເຕີ | ອະທິບາຍ | ການຕັ້ງຄ່າພາລາມິເຕີ | ອະທິບາຍ |
| P0-00=0 | ການຄວບຄຸມ VF | P5-00=1 | ໄປຂ້າງຫນ້າ |
| P0-04=1 | ຢຸດເລີ່ມຕົ້ນເຄື່ອງໃຊ້ພາຍນອກ | P5-01=2 | ດໍາເນີນການຕໍ່ມາ |
| P0-06=1 | ການຕັ້ງຄ່າຄວາມຖີ່ດິຈິຕອນ | P6-00=2 | Relay 1 ຜົນຜະລິດຜິດ |
| P0-14=60.00 | ຄວາມຖີ່ສູງສຸດ | P4-01=1.6KW | ພະລັງງານມໍເຕີທີ່ເຊື່ອມຕໍ່ |
| P0-16=60.00 | ຄວາມຖີ່ຂອບເຂດສູງສຸດ | P4-02=380V | ແຮງດັນໄຟຟ້າຈັດອັນດັບຂອງມໍເຕີ |
| P0-11=60.00 | ຄວາມຖີ່ການຕັ້ງຄ່າດິຈິຕອນ | P4-04=3.3A | ມໍເຕີຈັດອັນດັບປັດຈຸບັນ |
| P0-23=3.0ວິ | ເວລາເລັ່ງ | P4-05=50Hz | ປະເມີນຄວາມຖີ່ຂອງມໍເຕີ |
| P0-24=2.0ວິ | ເວລາຊ້າ | P4-06=960R/ນາທີ | ອັດຕາຄວາມໄວຂອງມໍເຕີ |
| ຫມາຍເຫດ: ເມື່ອຕົວແປງຄວາມຖີ່ຫນຶ່ງຖືກນໍາໃຊ້ກັບສອງມໍເຕີ, ມັນແນະນໍາໃຫ້ຕິດຕັ້ງ relay ຄວາມຮ້ອນທີ່ກົງກັນຢູ່ດ້ານຫນ້າຂອງແຕ່ລະມໍເຕີເພື່ອປົກປ້ອງແຕ່ລະມໍເຕີ. | |||
ການວິເຄາະຜົນການປະຕິບັດງານ
ຕົວປ່ຽນຄວາມຖີ່ຊຸດ KD600 ໄດ້ປະຕິບັດການຫັນປ່ຽນຄວາມຖີ່ໃນລະບົບການເດີນທາງ, ແລະຜົນກະທົບ tr-anformation ແມ່ນຂ້ອນຂ້າງເຫມາະສົມ, ສ່ວນໃຫຍ່ແມ່ນສະແດງໃຫ້ເຫັນໃນ:
- ການເລີ່ມຕົ້ນອ່ອນແລະການຢຸດເຊົາການອ່ອນໃນລະຫວ່າງການເລີ່ມຕົ້ນແມ່ນຮັບຮູ້, ເຊິ່ງຊ່ວຍຫຼຸດຜ່ອນຜົນກະທົບຕໍ່ຕາຂ່າຍໄຟຟ້າ;
- ຫຼັງຈາກການນໍາໃຊ້ຕົວແປງຄວາມຖີ່, contactor ປ່ຽນຕົ້ນສະບັບແລະຕົວຕ້ານທານຄວາມໄວແມ່ນຖືກຍົກເລີກ, ເຊິ່ງບໍ່ພຽງແຕ່ປະຫຍັດຄ່າໃຊ້ຈ່າຍໃນການຮັກສາ, ແຕ່ຍັງຫຼຸດຜ່ອນເວລາ downtime ສໍາລັບການບໍາລຸງຮັກສາ, ດັ່ງນັ້ນການເພີ່ມຜົນຜະລິດ;
- ໃນເວລາທີ່ hook ຕົ້ນຕໍເຮັດວຽກຢູ່ທີ່ 5Hz ~ 30Hz, ຜົນກະທົບການປະຫຍັດພະລັງງານແມ່ນຈະແຈ້ງຫຼາຍ;
- ຕົວປ່ຽນຄວາມຖີ່ຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມການເດີນທາງທາງຫນ້າແລະດ້ານຫລັງ, ແລະຊຸດກົນໄກການເດີນທາງຊ້າຍແລະຂວາສາມາດຮັບຮູ້ການເຮັດວຽກເກີນຄວາມຖີ່. ພາຍໃຕ້ການຮັບປະກັນຄວາມປອດໄພ, ປະສິດທິພາບການເຮັດວຽກໄດ້ຖືກປັບປຸງຢ່າງຫຼວງຫຼາຍ, ແລະວຽກງານບໍາລຸງຮັກສາຂອງອຸປະກອນການເດີນທາງເນື່ອງຈາກການທົດແທນເລື້ອຍໆຂອງ contactors AC ຍັງຫຼຸດລົງ.
ຄຳກ່າວປິດ
ຕົວແປງຄວາມຖີ່ຖືກນໍາໃຊ້ເພື່ອຄວບຄຸມການຍ່າງທາງຫນ້າແລະຫລັງແລະຊຸດກົນໄກການຍ່າງຊ້າຍແລະຂວາ, ເຊິ່ງສາມາດຮັບຮູ້ການເຮັດວຽກ overclocking, ປັບປຸງປະສິດທິພາບການເຮັດວຽກຢ່າງຫຼວງຫຼາຍພາຍໃຕ້ການຮັບປະກັນຄວາມປອດໄພ, ແລະຍັງຫຼຸດຜ່ອນການບໍາລຸງຮັກສາຂອງອຸປະກອນການຂັບລົດເນື່ອງຈາກການ. ການທົດແທນເລື້ອຍໆຂອງ contactors AC.
ເວັບໄຊຄໍາຮ້ອງສະຫມັກ

ເວລາປະກາດ: 17-11-2023