
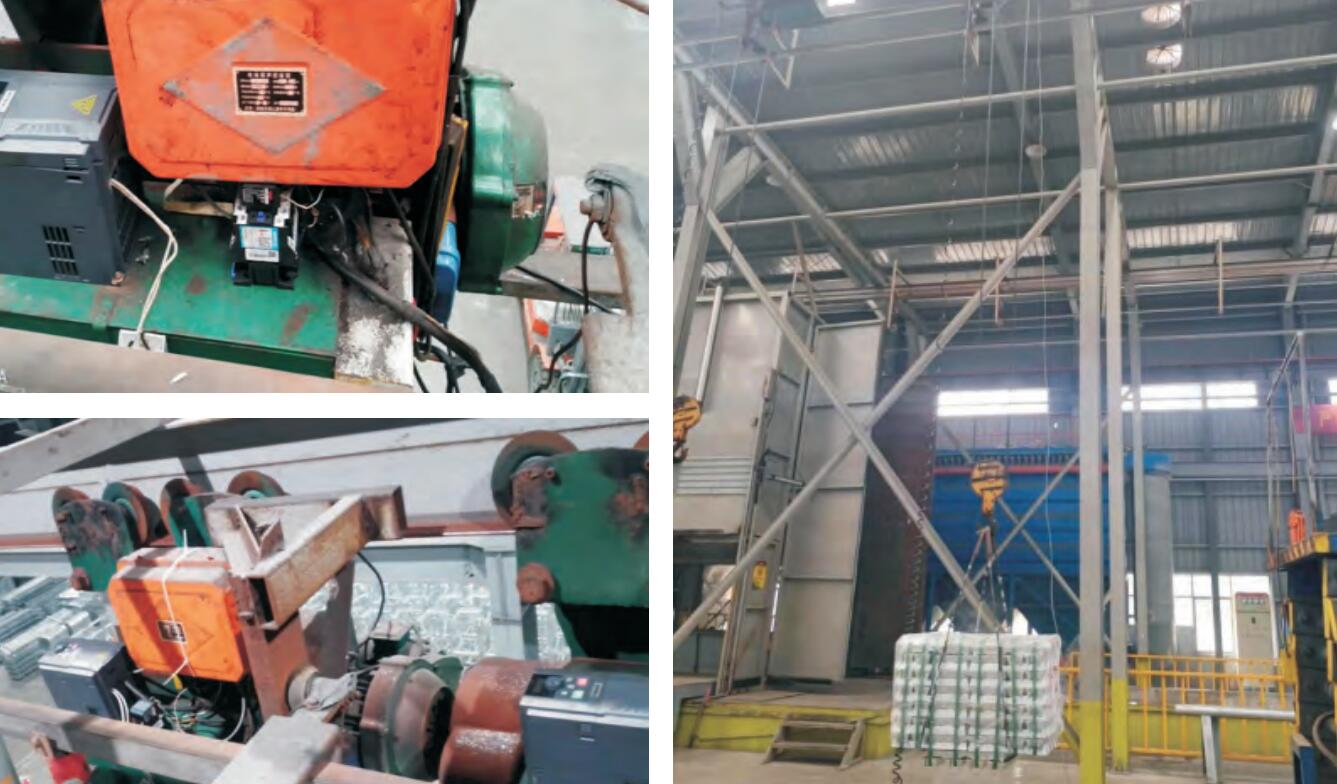
ພາບລວມ
ລົດບັນທຸກ beam ດຽວແມ່ນອຸປະກອນທີ່ໃຊ້ທົ່ວໄປໃນພາກສະຫນາມອຸດສາຫະກໍາ, ເຊິ່ງຖືກນໍາໃຊ້ເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວຂອງສິນຄ້າໃນຊ່ອງສາມມິຕິລະດັບ. ໃນບັນດາພວກເຂົາ, ການດໍາເນີນງານຂອງທັງສອງທິດທາງຂອງຍົນແນວນອນແມ່ນສໍາເລັດໂດຍຂະຫນາດໃຫຍ່, ລົດ, ທິດທາງຕັ້ງຂອງການດໍາເນີນງານແມ່ນຮັບຜິດຊອບສໍາລັບການຍົກຂອງກົນໄກການ hoist ໄຟຟ້າ, hoist ໄຟຟ້າເປັນມໍເຕີຮູບຈວຍສອງຄວາມໄວ,. ຮູບແບບການຄວບຄຸມໄຟຟ້າແມ່ນພື້ນຖານ AC contactor ເລີ່ມຕົ້ນໂດຍກົງ, ກະແສຜົນກະທົບແມ່ນໃຫຍ່ເກີນໄປ, ງ່າຍທີ່ຈະເຮັດໃຫ້ເກີດຄວາມເສຍຫາຍຕໍ່ມໍເຕີແລະອົງປະກອບ, ຊີວິດຂອງອຸປະກອນກົນຈັກສັ້ນລົງ, ປະລິມານການບໍາລຸງຮັກສາແມ່ນຂ້ອນຂ້າງໃຫຍ່. ແລະລັກສະນະລະບຽບການຄວາມໄວແມ່ນບໍ່ດີ, debugging ແມ່ນບໍ່ກ້ຽງພຽງພໍ.
ຄຸນລັກສະນະຂອງການດໍາເນີນງານ hoist ໄຟຟ້າ
crane ມີແຮງບິດເລີ່ມຕົ້ນຂະຫນາດໃຫຍ່, ປົກກະຕິແລ້ວຫຼາຍກ່ວາ 150% ຂອງ torque ຈັດອັນດັບ, ຖ້າຫາກວ່າພິຈາລະນາ overload ແລະປັດໃຈອື່ນໆ, ຢ່າງຫນ້ອຍ 200% ຂອງ torque ຈັດອັນດັບຄວນໄດ້ຮັບການສະຫນອງໃຫ້ໃນລະຫວ່າງການຂະບວນການເລັ່ງການເລີ່ມຕົ້ນ.
ໃນເວລາທີ່ກົນໄກການຍົກກໍາລັງແລ່ນລົງ, ມໍເຕີຈະຢູ່ໃນສະພາບການຜະລິດ po-wer regenerative ແລະມັນຈະຕ້ອງຖືກເບກການບໍລິໂພກພະລັງງານຫຼືການຕອບໂຕ້ຄືນໃຫມ່ກັບຕາຂ່າຍໄຟຟ້າ.
ການໂຫຼດຂອງກົນໄກການຍົກມີການປ່ຽນແປງຢ່າງໄວວາໃນເວລາທີ່ນ້ໍາຫນັກຍົກອອກຈາກຫຼືແຕະພື້ນດິນ, ແລະ inverter ຄວນຈະສາມາດຄວບຄຸມການໂຫຼດຜົນກະທົບໄດ້ຢ່າງລຽບງ່າຍ.
ຄຸນສົມບັດ inverter KD600
- ພາກສະຫນາມແມ່ເຫຼັກຮັດກຸມປະຈຸບັນການຄວບຄຸມ vector loop ເປີດ, motor variables ແມ່ນ decoupled comple-tely, ມີ torque ຄວາມຖີ່ຕ່ໍາ, ຄວາມໄວຕອບສະຫນອງໄວແລະລັກສະນະອື່ນໆ;
- KD600ຮັບຮອງເອົາ PG-free loop vector control mode and vectorized V/F mode to expand the power level of one step;
- ລະດັບຄວາມຖີ່: 0.5-600Hz ຂັ້ນຕອນຂອງການຕັ້ງ, ການປັບຕົວຢ່າງຕໍ່ເນື່ອງ stepless;
- ຊ່ວງແຮງດັນໄຟຟ້າ: 380V ± 20%, ແຮງດັນລົດເມທັນທີທີ່ຕໍ່າກວ່າ 360VDC ການດໍາເນີນງານທີ່ບໍ່ມີບັນຫາ;
- Overloadcapacity: 150% rated ໃນປັດຈຸບັນ, ອະນຸຍາດໃຫ້ 1 ນາທີ; 200% rating ໃນປັດຈຸບັນ, 1 ວິນາທີອະນຸຍາດໃຫ້;
- ຄຸນລັກສະນະຂອງແຮງບິດ: ແຮງບິດເລີ່ມຕົ້ນ, ຫຼາຍກວ່າ 2 ເທົ່າຂອງແຮງບິດທີ່ຖືກຈັດອັນດັບ; ແຮງບິດຄວາມຖີ່ຕ່ໍາ, 1Hz ຫຼາຍກ່ວາ 1.6 ເທົ່າຂອງ torque ຈັດອັນດັບ; ແຮງບິດເບຣກແມ່ນຍິ່ງໃຫຍ່ກວ່າແຮງບິດທີ່ຈັດອັນດັບ.
ແຜນວາດສາຍໄຟງ່າຍດາຍ
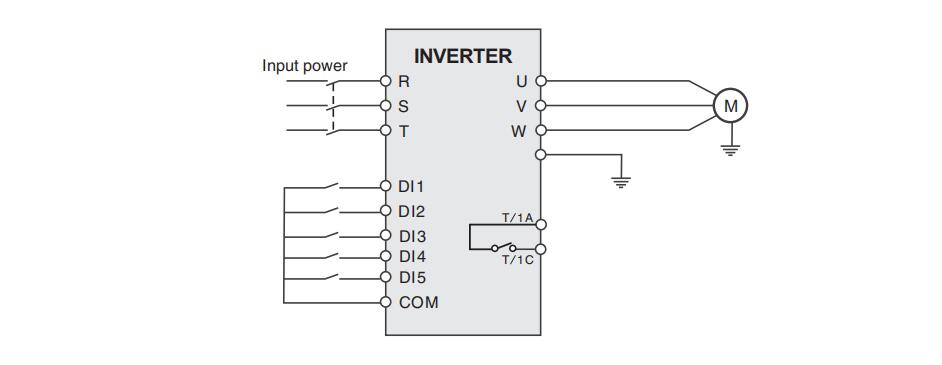
ຕົວກໍານົດການອ້າງອິງການຕັ້ງຄ່າແລະຄໍາອະທິບາຍມີດັ່ງນີ້
| ລະຫັດຟັງຊັນ | ກໍານົດມູນຄ່າ | ຄໍາແນະນໍາ | ຂໍ້ສັງເກດ |
| P0-03 | 1 | ໂໝດ vector | |
| P0-04 | 1 | ການຄວບຄຸມຢູ່ປາຍຍອດ | |
| P0-06 | 4 | ຄວາມຖີ່ຫຼາຍຄວາມໄວ | |
| P0-23 | 3 | ເວລາເລັ່ງ | |
| P0-25 | 5 | ເວລາຊ້າລົງ | |
| P6-00 | 32 | ການຄວບຄຸມເບກ | |
| B5-00 | 1 | ຫ້າມລໍ້ | |
| B5-01 | 2.5 | ປ່ອຍຄວາມຖີ່ເບກ | |
| B5-04 | 1.5 | ຄວາມຖີ່ຂອງເບກ | |
| P4-01 | ພະລັງງານມໍເຕີ | ||
| P4-02 | ແຮງດັນຂອງມໍເຕີ | ||
| P4-04 | motor rating ປັດຈຸບັນ | ||
| P4-05 | motor rating ຄວາມຖີ່ | ||
| P4-06 | ຄວາມໄວມໍເຕີ | ||
| P5-00 | 1 | ສົ່ງຕໍ່ | |
| P5-01 | 2 | ປີ້ນກັບກັນ | |
| P5-02 | 12 | ຫຼາຍຄວາມໄວ 1 | ຄວາມໄວຕ່ໍາ |
| P5-03 | 13 | ຫຼາຍຄວາມໄວ 2 | ຄວາມໄວກາງ |
| P5-04 | 14 | ຫຼາຍຄວາມໄວ 3 | ຄວາມໄວສູງ |
| PC-01 | ຄວາມຖີ່ຄວາມໄວຕ່ໍາ | ||
| PC-02 | ຄວາມຖີ່ຄວາມໄວກາງ | ||
| PC-04 | ຄວາມຖີ່ຄວາມໄວສູງ |
ການວິເຄາະຜົນການປະຕິບັດງານ
KD series inverter ການຫັນປ່ຽນຂອງລະບົບການຂັບລົດ, ຜົນກະທົບການຫັນເປັນທີ່ເຫມາະສົມ, ສ່ວນໃຫຍ່ແມ່ນຢູ່ໃນ:
- ການເລີ່ມຕົ້ນອ່ອນໆແລະການຢຸດອ່ອນແມ່ນຮັບຮູ້ໃນເວລາທີ່ເລີ່ມຕົ້ນ, ຫຼຸດຜ່ອນຜົນກະທົບຕໍ່ຕາຂ່າຍໄຟຟ້າ.
- ການນໍາໃຊ້ຕົວແປງຄວາມຖີ່ເພື່ອກໍາຈັດ contactor ປ່ຽນຕົ້ນສະບັບແລະຄວາມໄວ resis-tance, ນັ້ນແມ່ນ, ເພື່ອປະຫຍັດຄ່າໃຊ້ຈ່າຍໃນການບໍາລຸງຮັກສາ, ແຕ່ຍັງຫຼຸດຜ່ອນເວລາການບໍາລຸງຮັກສາ downtime, ດັ່ງນັ້ນການປັບປຸງຜົນຜະລິດ.
- hook ຕົ້ນຕໍທີ່ເຮັດວຽກຢູ່ທີ່ 5Hz ~ 30Hz ສາມາດມີຜົນກະທົບທີ່ຊັດເຈນຫຼາຍ.
- ປັບປຸງຂະບວນການພາກສະຫນາມ, ປະຫຍັດວັດຖຸດິບ;
ຄຳກ່າວປິດ
ການນໍາໃຊ້ຕົວແປງຄວາມຖີ່ເພື່ອຄວບຄຸມການເດີນທາງທາງຫນ້າແລະຫລັງ, ເຊັ່ນດຽວກັນກັບຊຸດກົນໄກການເດີນທາງຊ້າຍແລະຂວາ, ສາມາດບັນລຸການດໍາເນີນງານຂອງຄວາມຖີ່, ປັບປຸງປະສິດທິພາບການເຮັດວຽກຢ່າງຫຼວງຫຼາຍໃນຂະນະທີ່ຮັບປະກັນຄວາມປອດໄພ, ແລະຍັງຫຼຸດຜ່ອນການບໍາລຸງຮັກສາການເຮັດວຽກຂອງການທົດແທນເລື້ອຍໆຂອງ AC. contactors ໃນອຸປະກອນຂັບລົດ.
ເວັບໄຊຄໍາຮ້ອງສະຫມັກ
ເວລາປະກາດ: 17-11-2023